五、操控 MoonCar
2023-11-01



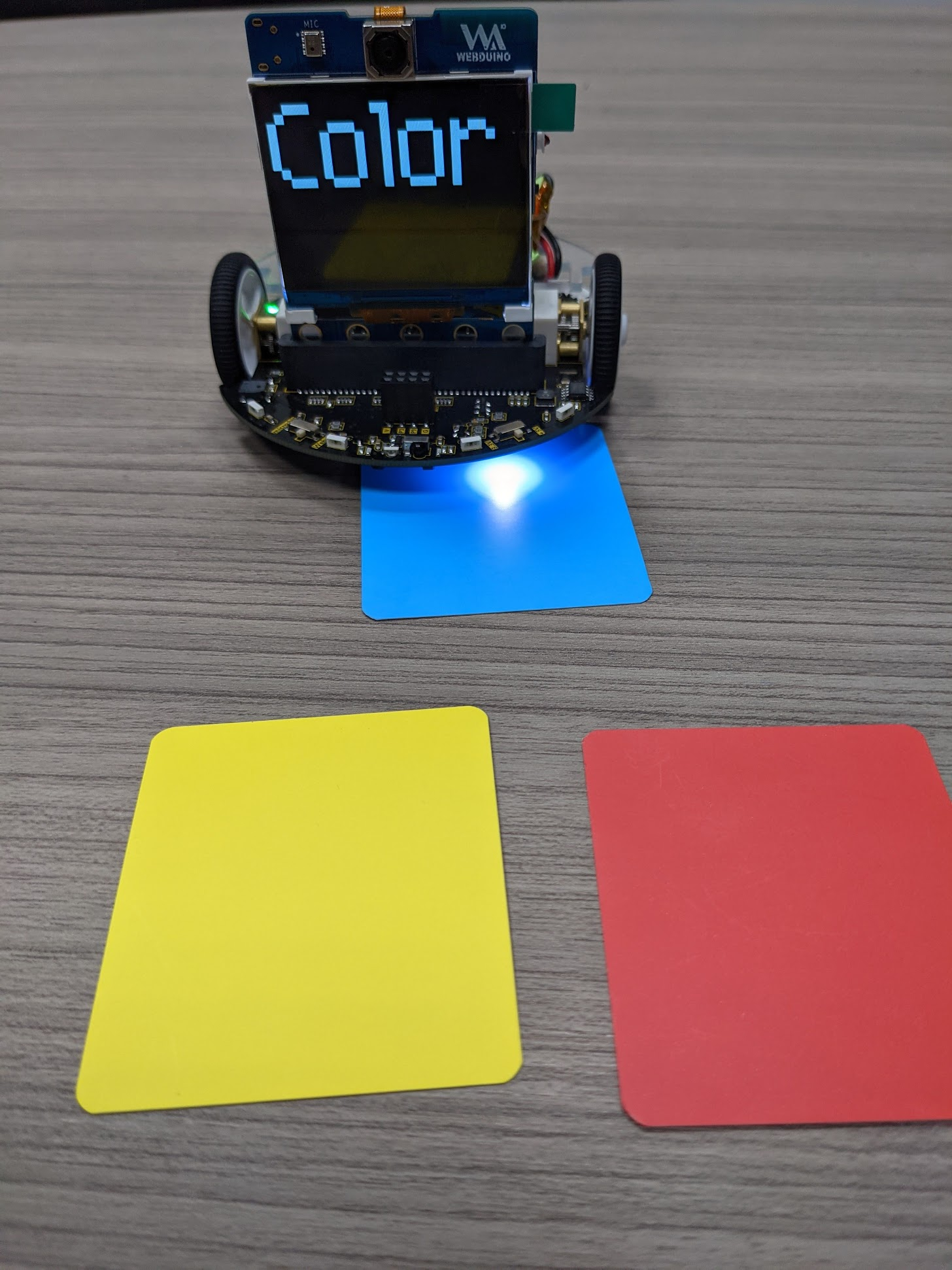
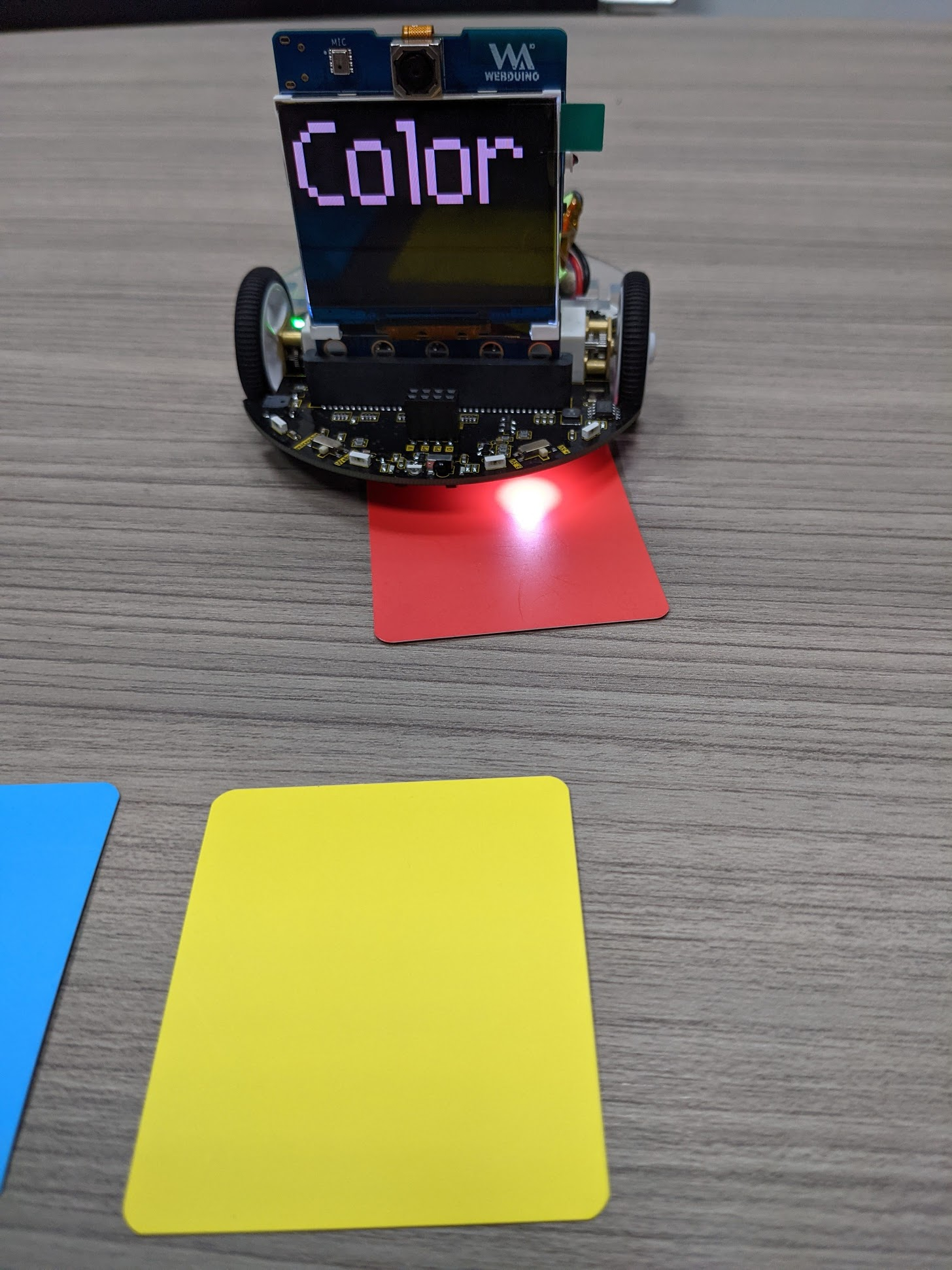
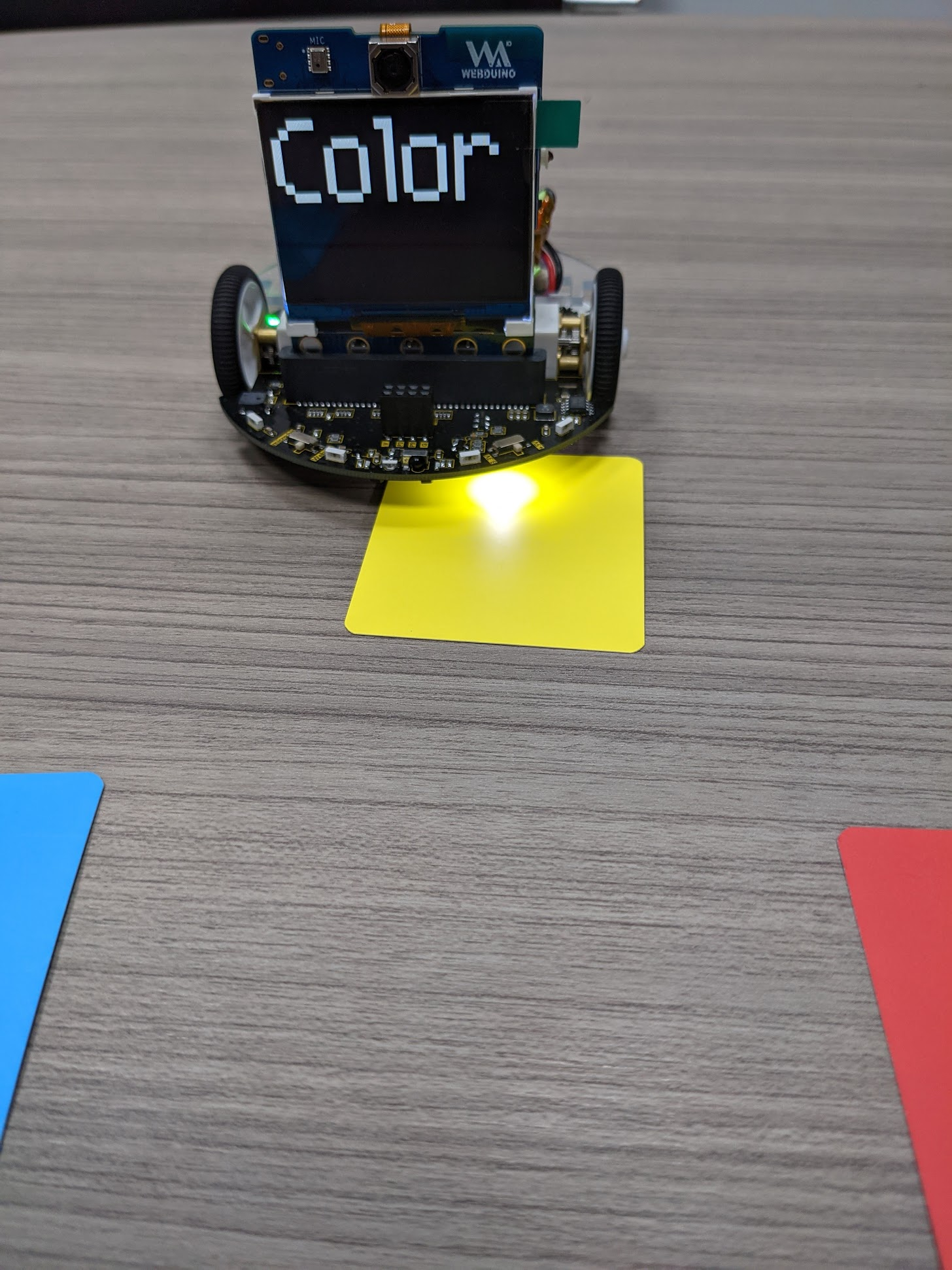
颜色侦测
这个例子中,颜色侦测使用的是 MoonCar 上面的 TCS34725 传感器,可用来侦测颜色。
先使用 class TCS34725 驱动传感器,进行打光和读取颜色值。
from webai_blockly import TCS34725
from webai import *
from machine import I2C
i2c = I2C(id=3, freq=100000, scl=17, sda=15) #1920
pinB=16 # light
fm.fpioa.set_function(pinB,fm.fpioa.GPIO6)
gpioB=GPIO(GPIO.GPIO6,GPIO.OUT)
gpioB.value(0)
s = TCS34725(i2c)
img = webai.snapshot()
img.clear()
v = 100
while True:
time.sleep_ms(200)
try:
data = s.read(raw=True)
data = (data[0]+v,data[1]+v,data[2]+v)
print(data)
img.draw_string(2,2, "Color", color=data, scale=11)
lcd.display(img)
except Exception as e:
print(e)
循迹行驶
让小车沿着黑线行驶。
from webai import *
speed = 60
carType = 1
def tracking(pin):
global carType,speed
left = p15.value()
right = p16.value()
msg = str(left)+" : "+str(right)
if left == 0 and right == 0:
if carType == 1:
mcar.forward(speed)
elif carType == 2:
mcar.move(0,speed)
elif carType == 3:
mcar.move(speed,0)
if left == 1 and right == 1:
carType = 1
mcar.forward(speed)
if left == 1 and right == 0:
carType = 2
mcar.move(0,speed)
if left == 0 and right == 1:
carType = 3
mcar.move(speed,0)
p15 = webai.io.pin(15,pull_mode=webai.io.PULL_NONE)
p15.irq(tracking,GPIO.IRQ_BOTH)
p16 = webai.io.pin(16,pull_mode=webai.io.PULL_NONE)
p16.irq(tracking,GPIO.IRQ_BOTH)
循迹 + 物件追踪
沿着黑线移动,看见红色小怪兽停车,看见绿色小怪兽继续前进。
- 第 58 行 ~ 第 61 行:判断处
from webai import *
speed = 60
carType = 1
def tracking(pin):
global carType,speed
left = p15.value()
right = p16.value()
msg = str(left)+" : "+str(right)
if left == 0 and right == 0:
if carType == 1:
mcar.forward(speed)
elif carType == 2:
mcar.move(0,speed)
elif carType == 3:
mcar.move(speed,0)
if left == 1 and right == 1:
carType = 1
mcar.forward(speed)
if left == 1 and right == 0:
carType = 2
mcar.move(0,speed)
if left == 0 and right == 1:
carType = 3
mcar.move(speed,0)
#webai.draw_string(140,100,msg,scale=2)
p15 = webai.io.pin(15,pull_mode=webai.io.PULL_NONE)
p15.irq(tracking,GPIO.IRQ_BOTH)
p16 = webai.io.pin(16,pull_mode=webai.io.PULL_NONE)
p16.irq(tracking,GPIO.IRQ_BOTH)
from webai_blockly import ObjectTracking
from time import sleep
from webai_blockly import Lcd
objGroup = None
obj = None
view = Lcd()
_deviceID = '6e5596'
otb = ObjectTracking(flip=1, model='monster', classes=['green','red','yellow','blue'], threshold=0.1, w=320, h=224)
while True:
otb.checkObjects()
green = otb.getObjects('green')
red = otb.getObjects('red')
if (len(red)) >= 1:
mcar.stop()
if (len(green)) >= 1:
tracking(None)
sleep(0.001)
马达控制
前进
mcar.forward() # 100% 动力前进
mcar.forward(100) # 100% 动力前进
mcar.forward(50) # 50% 动力前进
后退
mcar.backward() # 100% 动力后退
mcar.backward(100) # 100% 动力后退
停止
mcar.stop() # 停止
mcar.forward(0) # 停止
mcar.backward(0) # 停止
左转
mcar.left(100) # 100% 动力左转
mcar.left(30) # 30% 动力左转
右转
mcar.right(100) # 100% 动力右转
mcar.right(30) # 30% 动力右转
左右轮
- ==mcar.move( 左轮 , 右轮 )==
- 数值区间:-100 ~ 100
from webai import *
mcar.move( 100 , 100) # 100% 前进
参考设定
mcar.move( -100 , -100) # 100% 后退
mcar.move( 45 , -45 ) # 向右转
mcar.move( -45 , 45 ) # 向左转
mcar.move(0,0) # 停止
相关传感器
超音波:距离侦测
利用发送超音波碰撞物体之后反射回来的时间差,来得出传感器与物体之间的距离。
使用前请记得先接上超音波传感器!
from fpioa_manager import *
from modules import hcsr04
import time
fm.register(6, fm.fpioa.GPIO0, force = True)
fm.register(11, fm.fpioa.GPIO1, force = True)
device = hcsr04(fm.fpioa.GPIO0,fm.fpioa.GPIO1)
while True:
try:
print(device.measure(hcsr04.UNIT_CM,100000))
time.sleep(0.05)
#except IDE interrupt
except Exception as e:
print(e)
if(str(e)=="IDE interrupt"):
break
红外线:无线控制

接收遥控器发射的红外线信号,并显示到屏幕上。
import lcd, image, utime
from Maix import GPIO
from fpioa_manager import fm
img = image.Image()
fm.register(25, fm.fpioa.GPIOHS1)
pin=GPIO(GPIO.GPIOHS1,GPIO.IN,GPIO.PULL_UP)
def read_data():
a = []
while pin.value() == 1:
pass
utime.sleep_us(13560)
for i in range(1000):
v = pin.value()
a.append(v)
utime.sleep_us(56)
a_c = []
count = 0
for i in a:
if i == 1:
count += 1
elif i == 0:
if count > 0 :
a_c.append(count)
count =0
for i in range(len(a_c)):
if a_c[i] > 10:
a_c[i] = "1"
else:
a_c[i] = "0"
B1 = "".join(a_c)
if(len(B1)==33):
print(B1[1:len(B1)])
hstr = '%0*X' % ((len(B1[1:len(B1)]) + 3) // 4, int(B1[1:len(B1)], 2))
print(hstr)
print("=====")
img.clear()
img.draw_string(50, 100, hstr, scale=5)
lcd.display(img)
return B1
while True:
f = read_data()
控制 LED 灯:魔幻 LED



- MoonCar 的 ws2812 Pin 脚为编号 22,总共有 8 颗灯
- 程序内容:魔幻 LED 示例。
- 第 4 行:设定 Pin 脚为 22、LED 数量为 8 颗灯。
from modules import ws2812
import time
class_ws2812 = ws2812(led_pin=22,led_num=8)
color = [(30,0,0),(0,30,0),(0,0,30),(30,30,0),(30,0,30),(0,30,30) ,(30,30,30),(0,0,0)]
while True:
for x in color :
for i in [0,1,2,3,4,5,6,7] :
class_ws2812.set_led(i,x)
class_ws2812.display()
time.sleep(0.05)
蜂鸣器:播放音乐
- MoonCar 的蜂鸣器 Pin 脚为编号 24。
- 程序内容:播放 3 个音符。
- 第 3 行:设定发音频率
- 第 4 行:设定发音时间 ( 秒 )
from webai_ext import Buzzer
buzzer = Buzzer()
tune = [392,692,440]
sec = [0.25,0.25,0.5]
for i in [0,1,2] :
buzzer.bee(tune[i],sec[i])
万用遥控器控制登月小车
执行程序后开发板屏幕会显示 QRcode,使用手机扫描后即可用 Webduino 万用遥控器控制小车。
万用遥控器的使用方式可以参考:万用遥控器控制登月小车。

from webai import *
import machine , ubinascii , os , time , gc , sensor
mcar.init()
def cmd(name,msg):
webai.cmdProcess.sub(name,msg)
if msg == 'up':
webai.show(file='mrun.jpg')
mcar.forward(50)
if msg == 'down':
webai.show(file='m02.jpg')
mcar.backward(50)
if msg == 'left':
webai.show(file='mleft.jpg')
mcar.left(50)
if msg == 'right':
webai.show(file='mright.jpg')
mcar.right(50)
if msg == 'reset':
webai.show(file='m01.jpg')
mcar.stop()
if msg == '开心':
webai.speaker.play(filename="logo.wav")
webai.show(file='mooncar.jpg')
webai.mqtt.sub('PING',cmd,includeID=True)