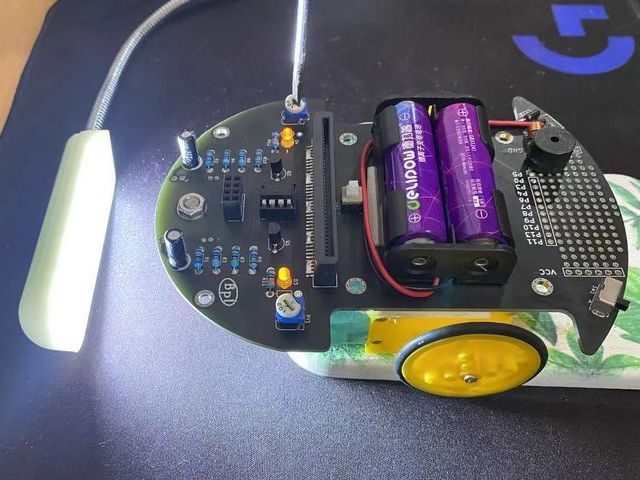
TriodeCar硬件分析及校准
驱动电路
这是一个最基础的电路:
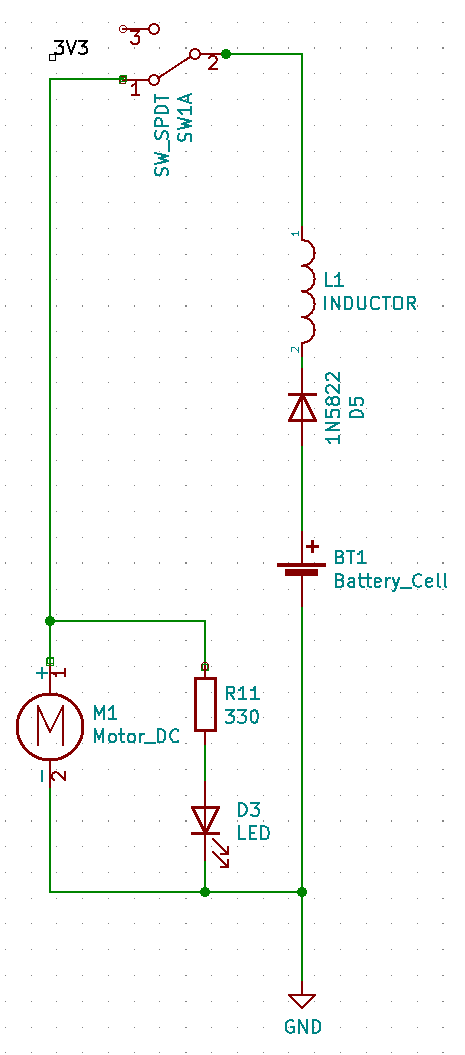
电池,二极管,电感,手动开关四者串联,两个负载并联接入,一个负载是电机,一个负载是发光二极管,作为对发光二极管的保护又给其串联了一个用于分压的电阻。
在这样的电路中唯一能控制两个负载的只有一个手动开关。
这是PNP型三极管:
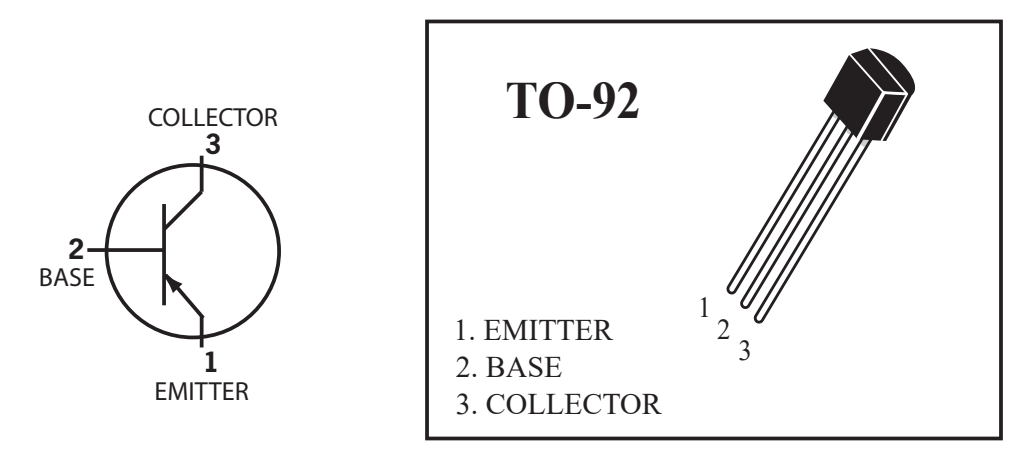
- 1脚 Emitter发射极
- 2脚 Base基极
- 3脚 Collector集电极
一般在原理图中三极管的E、B、C指的就是此三脚。
双极性结型晶体管(bipolar junction transistor, BJT),俗称三极管,是一种具有三个终端的电子器件,由三部分掺杂程度不同的半导体制成。双极性晶体管是电子学历史上具有革命意义的一项发明,其发明者威廉·肖克利、约翰·巴丁和沃尔特·布喇顿被授予1956年的诺贝尔物理学奖。
在双极性晶体管电学符号中, Base基极 和 Emitter发射极 之间的箭头指向电流的方向,这里的电流为电子流动的反方向。PNP型晶体管的箭头从 Emitter发射极 指向 Base基极 ,而NPN型与之相反。
想了解其更详尽的信息,可以继续参考维基百科:双极性晶体管,或者检索其他相关的文献资料,需要具备相应的 数理化 前置知识才能更好的理解。
将一个PNP型三极管加入电路:
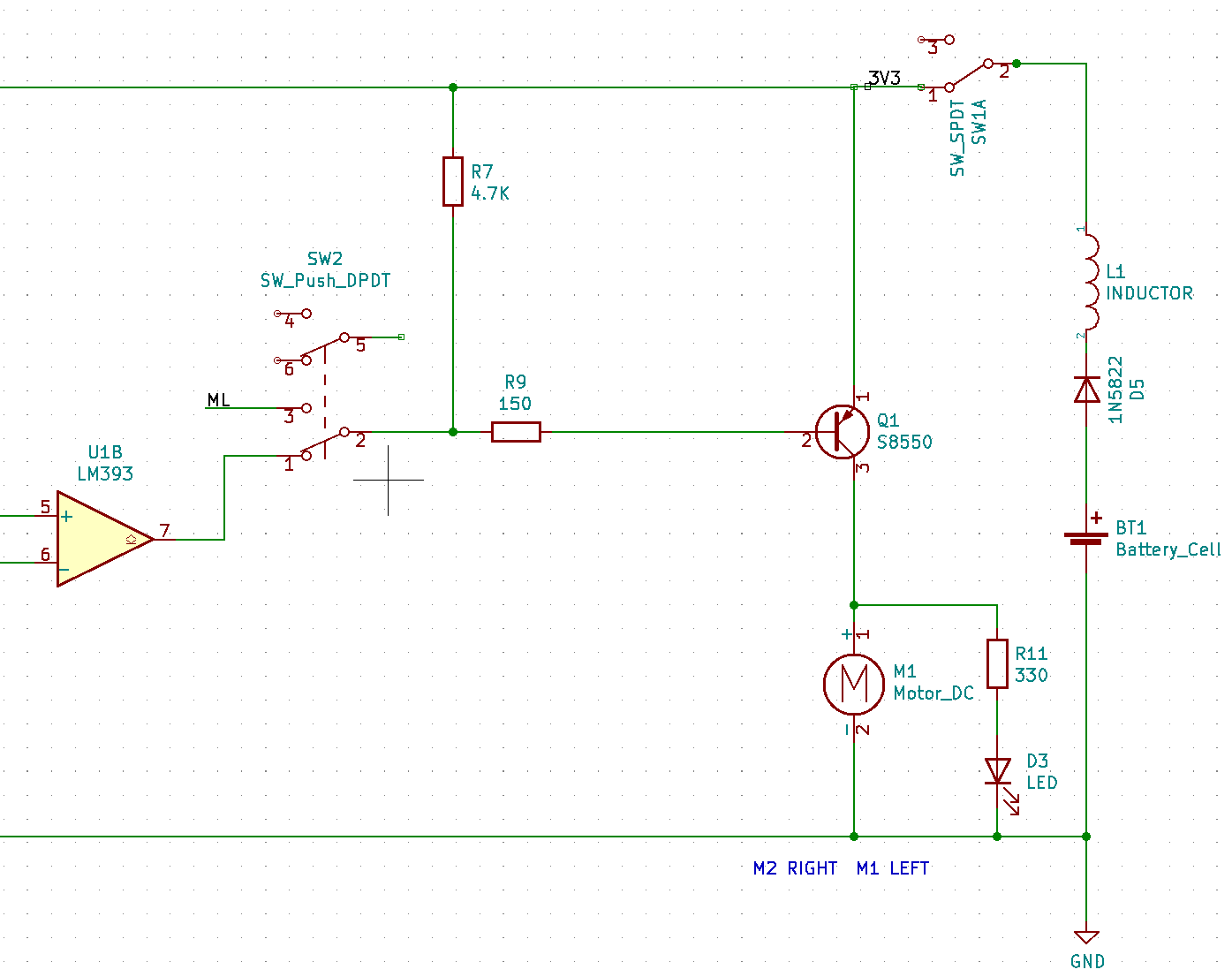
设计这样的电路可以控制PNP型三极管的2脚 Base基极 电压,这个PNP型三极管即可作为一个开关使用。
1脚 Emitter发射极 与 3脚 Collector集电极导通条件为,Emitter发射极电压大于Collector集电极电压,Emitter发射极电压大于Base基极电压。而当Base基极电压大于或等于Emitter发射极电压时则关断。
两个负载被 Base基极 所接收到的电平信号所控制,而此电平信号则由 电压比较器 的输出端提供,通过另一个开关还可切换至由 micro:bit 或 web:bit 开发板来提供。
R7 在这里起到一个上拉电阻的作用,即使没有给2脚 Base基极输入控制信号,控制信号输出端悬空,既没有给高电平也没给低电平,类似于开路的状态,通过R7上拉电阻,也能使2脚 Base基极获得一个高电平,保持PNP三极管关断的状态,使得此电路仅在2脚 Base基极获得低电平信号时才可导通。
有关“高低电平”、“电平信号”更详尽的信息可以参考百度百科:逻辑电平,或者检索其他相关的文献资料。
巡线检测电路
在Triode-Car的底部,有两个巡线检测电路,每一路包含了一个光敏电阻和一个LED。当LED的光照到黑色和白色的材料上面时,由于反射率的不同,光敏电阻的阻值会发生明显的变化。
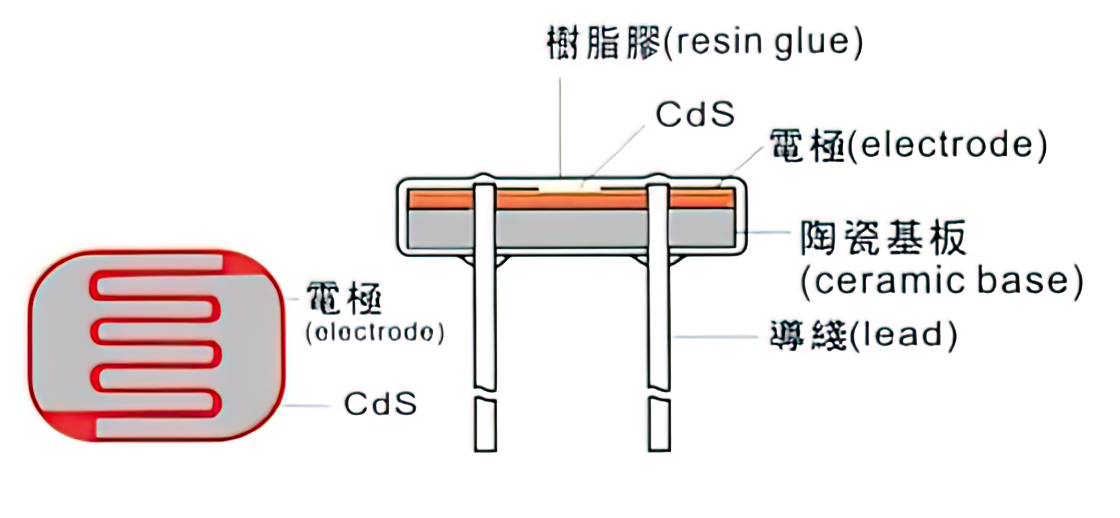
在Triode-Car上,光敏电阻使用的器件型号是GL5506,其电阻值会随着光照的加强而减小,亮电阻(10Lux)是2-5KΩ,暗电阻是0.2MΩ。
亮电阻:用400-600Lux光照射2小时后,在标准光源(色温2854K)10Lux光照下的测量的电阻值。
暗电阻:关闭10Lux光照后第10秒测量的电阻值。
设计这样的电路:
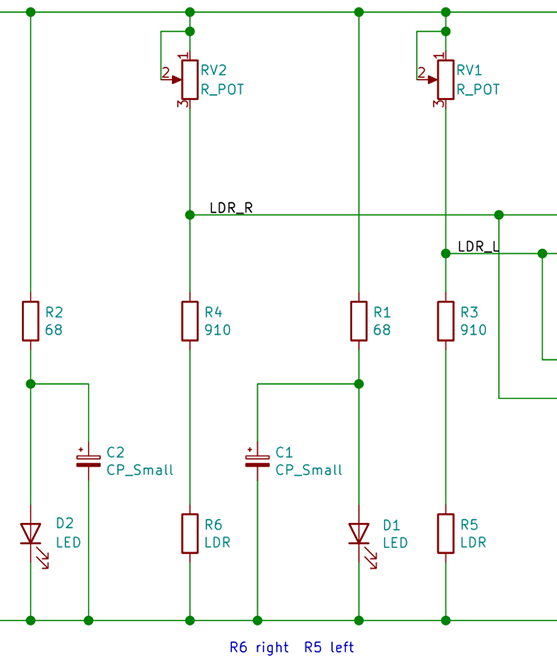
可以看到,由RV1可调电阻、R3电阻、R5光敏电阻组成的支路与由RV2可调电阻、R4电阻、R6光敏电阻组成的支路是并联的。
根据并联等压分流的原理,两条支路电压相等。
在R5光敏电阻所在的支路上,根据串联等流分压的原理,LDR_L 节点电压等于电流值乘以(R5+R3)阻值,当R5光敏电阻所受光照减弱,其阻值将增大, LDR_L 节点电压随之增大,反之光照增强时也同理。
LDR_R 节点电压亦同理。
根据串联等流分压的原理,若使RV1可调电阻的阻值增大,LDR_L 节点电压则会减小,反之同理。
RV2可调电阻亦同理。
这样,两个可调电阻即可用于校准 LDR_R 与 LDR_L 两个节点的电压值,尽量保证相同光照强度下两个节点电压值相等,以便后续 电压比较器 的应用。
电压比较器
这是LM393电压比较器的原理图:
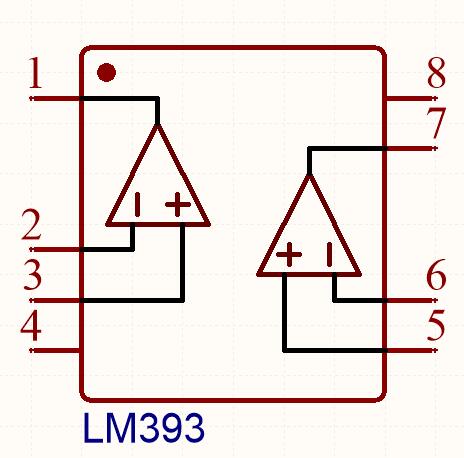
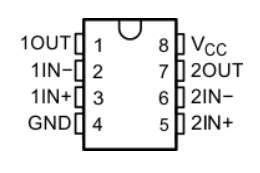
其内部集成了两个电压比较器,当电压比较器的同相输入端(IN+)大于反相输入端(IN-)电压时,输出高电平,反之则输出低电平。而其电压比较器的内部原理图则是这样:
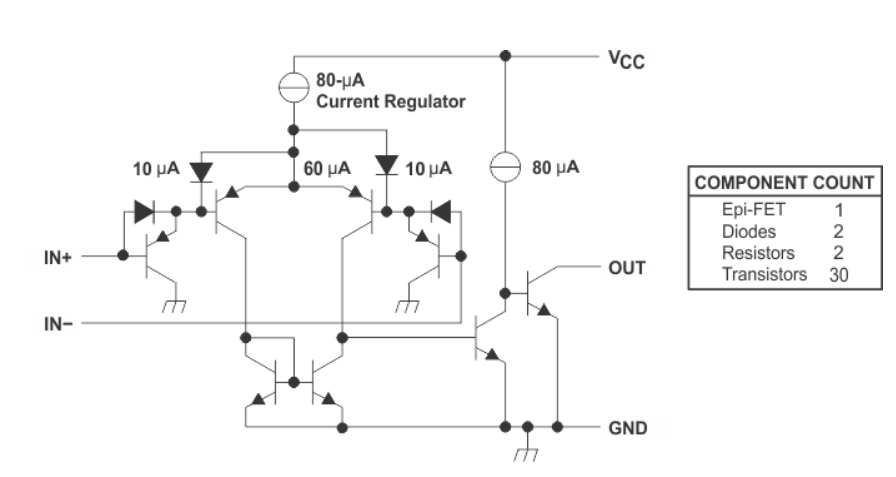
由此可见,实现 “比较两个输入端的电压大小” 这样相对复杂的功能,也是基于二极管、三极管等基础元件来设计并封装而成的。
此处不对其做更深入的原理分析,感兴趣的可以参考维基百科:比较器,或者检索其他相关的文献资料。
将LM393电压比较器加入电路中,并补全驱动电路和巡线检测电路(单击图片可放大查看):
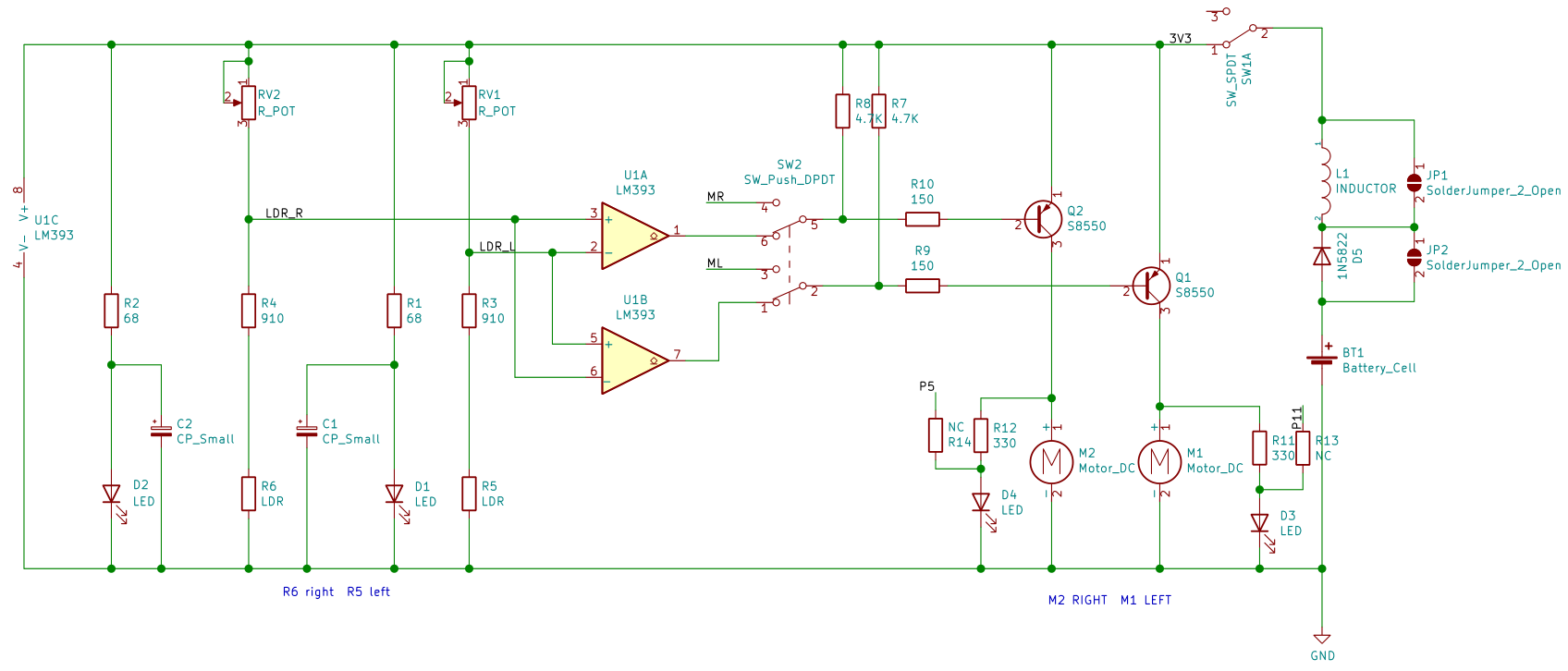
至此,我们就基本构建出一个自动控制系统,在其较为理想的工作状况下,它可以在一定范围内经由光敏电阻采集左右两侧道路明暗的信息,电压比较器在信息变化中不断的分别控制着两个轮子启停,以修正行驶方向。
各元件的信号与工作状态关系表
| 车头相较线路偏向 | (右)R6 LDR光感 | (左)R5 LDR光感 | LDR_R 电位 | LDR_L 电位 | P3输入 | P2输入 | P1输出 | P5输入 | P6输入 | P7输出 | M2右电机 | M1左电机 | 小车行进方向 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 右 | 明 | 暗 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 左 |
| 左 | 暗 | 明 | 1 | 0 | 1 | 0 | 1 | 0 | 1 | 0 | 0 | 1 | 右 |
条件为黑色线路与白色路面
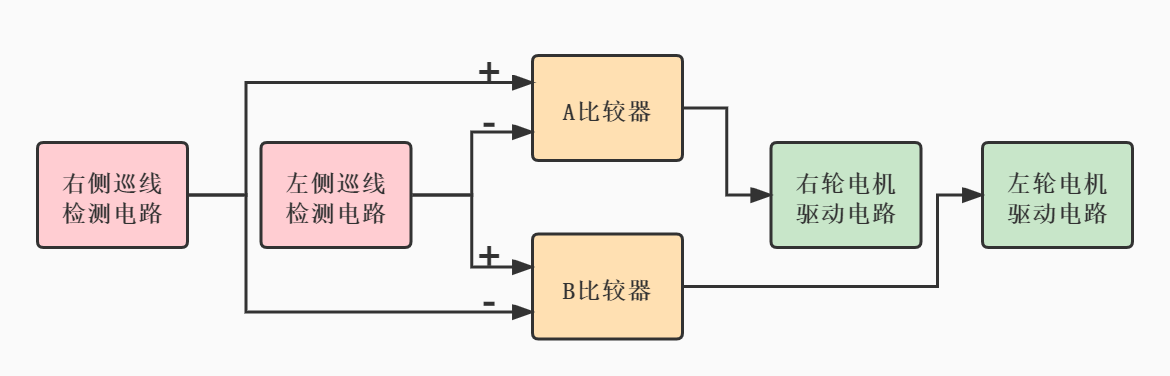
以车头相较线路偏向 右 为例:
- 车头下部右侧R6光敏电阻将来到白色路面上方,而左侧R5光敏电阻将来到黑色线路上方。
- R6阻值减小,R5阻值增大,LDR_R节点电位将低于LDR_L节点电位。
- A比较器的P3引脚电位将低于P2引脚电位,B比较器的P5引脚电位将高于P6引脚电位。
- A比较器的P1引脚将输出低电平,B比较器的P7引脚将输出高电平。
- Q2PNP三极管导通,M2右电机启动,Q1PNP三极管截止,M1左电机停止。
- 小车将向左行驶。
当车头相较线路偏向 左 时,小车同样会向右行驶。
这样无论偏左偏右,Triode-Car都能自动的反向修正,达到沿着线路行驶的目的。
巡线检测电路的校准
为了使巡线检测电路在单独使用LM393芯片控制的状态下有着对明暗变化更高的灵敏度,以及减少相同光照亮度下的电势差,需要通过手动调整可调电阻来进行校准。
校准步骤如下:
- 将小车用小物件微微将轮子抬起以防接触表面,将小车的光敏电阻对准一个稳定光源(台灯或手电筒)。
- 随意调整任一边可调电组,直到两侧马达同时运转。
- 调整完成后,放置在跑道上测试结果。
- 若小车还是有概率冲出跑道,将小车放置于白纸上,重复2~3步骤进行微调,尝试使巡线检测电路对明暗变化有更高的灵敏度。