Use of onboard resources
This chapter mainly uses some sample projects to explain the basic usage of the peripherals of the Leaf-S3 main control board. Through the following projects, you can modify them to complete your own projects.
The Leaf-S3 peripherals mainly include: UART, I2C, SPI, ADC, PWM, DAC, etc.
Preparation before starting
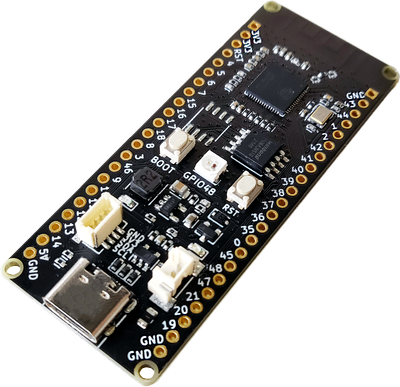
The typec on the BPI-Leaf-S3 development board uses the native USB interface of ESP32-S3 instead of the traditional USB-to-TLL chip.
In order for your development board to download the program correctly, you need to set the BPI-Leaf-S3 to the download mode, there are two methods:
Connect to the computer via USB, press the BOOT button, press the Reset button and release it, and finally release the BOOT button.
In the state of disconnecting all power supplies, press and hold the BOOT button, then plug the development board into the computer, and finally release the BOOT button.
At this time, you can see more than one COM port in the device manager.
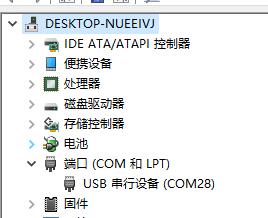
Select this port in the IDE

Project 1 Serial port experiment
In the very first chapter, we uploaded a Blink program to test the LED status lights on the board. Now, we use the UART serial port and print the timing data every second.
Serial port experiment: required components
Leaf-S3 Motherboard X 1
Serial port experiment: hardware connection
This project does not require other sensors, so you only need to connect the Leaf-S3 to the computer with USB.
Serial port experiment: code
Open the Arduino IDE. Although the code can be copied directly, we recommend that you manually enter the code yourself to familiarize yourself.
code show as below:
Expand to view
void setup()
{
Serial.begin(115200); //Set the serial communication baud rate
}
void loop()
{
static unsigned long i = 0; //Define variable i
Serial.println(i++); //output i after adding one
delay(1000); //Delay for 1 second
}
After the input is complete, click "Compile" to check the code for errors. After making sure there are no errors, you can start uploading. After clicking "Upload", the IDE will send the code to the Leaf-S3 motherboard. After the upload is complete, you need to press the reset button so that the code can run normally
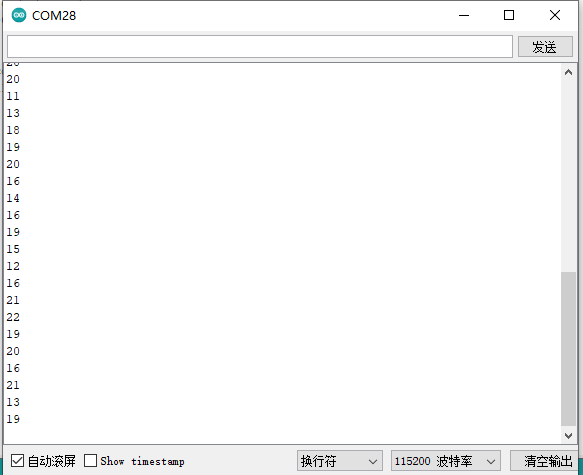
Serial port experiment: experimental phenomenon
After uploading the previous steps, open the serial monitor that comes with the Arduino IDE, and you can see the following print information:
Project 2 PWM (breathing light)
Breathing lights, that is, let Leaf-S3 drive LED lights through PWM to realize the gradual change of LED brightness, which looks like it is breathing. For an explanation of PWM, please read the knowledge expansion section.
PWM Experiment: Required Components
Leaf-S3 Motherboard X 1
LED X 1 (It is recommended to connect a resistor in series to limit the current)

PWM Experiment: Hardware Connection
Just connect the LED to GPIO13 of Leaf-S3, the long one is connected to GPIO13, and the short one is connected to GND
PWM Experiment: Code
Open the Arduino IDE. Although the code can be copied directly, we recommend that you manually enter the code yourself to familiarize yourself.
code show as below:
Expand to view
#define LED_CHANNEL_0 0 //Set channel 0
#define LED_TIMER_13_BIT 13 //Set 13-bit timer
#define LED_BASE_FREQ 5000 //Set timer frequency to 5000Hz
#define LED_PIN 13 //Set the LED light
int brightness = 0; // LED brightness
int fadeAmount = 1; // number of LEDs
//Set the brightness of the led light
void ledcAnalogWrite(uint32_t value, uint32_t valueMax = 255) {
// calculate duty cycle
uint32_t duty = (LED_BASE_FREQ / valueMax) * min(value, valueMax);
//Set the duty cycle
ledcWrite(LED_CHANNEL_0, duty);
}
void setup() {
ledcSetup(LED_CHANNEL_0, LED_BASE_FREQ, LED_TIMER_13_BIT); ledcAttachPin(LED_PIN, LED_CHANNEL_0);
}
void loop() {
ledcAnalogWrite(brightness); brightness += fadeAmount;
if (brightness <= 0 || brightness >= 255) {
fadeAmount = -fadeAmount;
}
delay(30);
}
After the input is complete, click the "Compile" button to check the code for errors. After confirming that there are no errors, you can start uploading, click the "Upload" button . The IDE will send the code to the Leaf-S3 board. After the upload is complete, you can see the LED light next to the Type-C start to "breathe"!
Now let's review the code and hardware to see how it works.
PWM experiment: relevant knowledge
What is a PWM control signal?
PWM (pulse-width modulation) pulse width modulation, MCU (microcontroller) controls the on and off of the switching device, so that the output terminal gets a series of pulses with equal amplitude, and these pulses are used to replace the sine wave or the required waveform. As shown below:
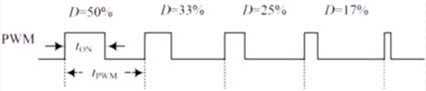
Among them, tON is the duration of high level, tPWM is the period of PWM wave, tPWM-tON is the duration of low level, and the duty cycle refers to the ratio of the duration of high level to the entire cycle, that is, D=ton/tPWM.
PWM Experiment: Code Analysis
The PWM of Leaf-S3 is much more advanced than that of ordinary Arduino UNO. You cannot simply use the analogWrite function to drive the PWM, but you need to set the timer function and related frequency parameters to work.
#define LEDC_CHANNEL_0 0
Defines the channel used by the timer. Leaf-S3 has a total of 16 channels, and channel 0 is used here.
#define LEDC_TIMER_13_BIT 13
The timer is defined as a 13-bit timer, that is, the maximum count of the timer is 2 to the 13th power.
#define LEDC_BASE_FREQ 5000
This is the frequency at which the timer is set, in Hz. The next brightness and fadeAmount parameters represent the PWM duty cycle and the value of each change respectively.
void ledcAnalogWrite(uint32_t value, uint32_t valueMax = 255)
This function is to calculate and set the PWM duty cycle, similar to Arduino's analogWrite function, it can be seen that the maximum value of the passed parameter is 255, which is compatible with analogWrite.
ledcSetup(LEDC_CHANNEL_0, LEDC_BASE_FREQ, LEDC_TIMER_13_BIT);
ledcAttachPin(LED_PIN, LEDC_CHANNEL_0);
These two functions are Leaf-S3 timer setting functions. The function prototype and principle are not described here. If you are interested, you can look at the underlying source code (source code address: C:\Users"your-PC"\AppData\Local\Arduino15 \packages\esp32\ hardware\ adafruit_metro_esp32s2 \0.0.3\libraries\ESP32), here you only need to know how to use these functions to set the relevant timers.
Regarding what is a PWM signal, it has been explained before, so it will not be explained here.
Note: Any pin of Leaf-S3 can be configured as PWM output, you can try to modify the code to complete your project.
Item 3 ADC
ADC (analog-to-digital converter or A/D converter) refers to converting analog signals into digital signals. The ADC of Leaf-S3 is 13-bit, the maximum output value is 8191, while the Arduino UNO is 10-bit, the maximum output value is 1023, so the accuracy is higher than that of Arduino UNO, and the conversion rate is fast, and it is easy to use Compatible with Arduino analogRead function, just read directly.
ADC Experiment: Required Components
Analog angle sensor X 1

Breadboard X 1
Leaf-S3 Motherboard X 1
ADC experiment: hardware connection
Plug the potentiometer into the Leaf-S3 main board, and then plug the analog angle sensor into IO2 (IO2 is used in the experiment). After the components are connected, use the USB cable to connect Leaf-S3 and computer.
ADC experiment: code
Open the Arduino IDE. Although the code can be copied directly, we recommend that you manually enter the code yourself to familiarize yourself. code show as below:
Expand to view
void setup() {
// put your setup code here, to run once:
Serial.begin(115200);
}
void loop() {
// put your main code here, to run repeatedly:
Serial. println(analogRead(2));
delay(100);
}
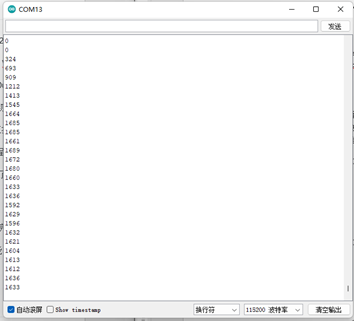
After the input is complete, click "Compile" to check the code for errors. After making sure there are no errors, you can start uploading. After clicking "Upload", the IDE will send the code to the Leaf-S3 motherboard. After the upload is complete, open the serial monitor of the Arduino IDE, rotate the analog angle sensor, and you can see the value changes in the serial monitor, as shown in the figure below:
ADC Experiment: Code Analysis
Since the ADC of Leaf-S3 is fully compatible with Arduino, there is no need to explain too much about the analogRead function here.
Note: If you are not particularly familiar with the basic functions of Arduino, you can click the link to learn.
Project 4 I2C
The I2C of Leaf-S3 can be configured to any I/O port, and you can configure it by passing relevant parameters. For the convenience of use, we have configured I2C by default, and it is fully compatible with Ardui in useno, the default configuration pins can be viewed in Chapter 1 Introduction. This project is based on I2C default configuration to drive OLED display.
Required components
I2C OLED-12864 Display X 1

Breadboard X 1
Leaf-S3 Motherboard X 1
I2C experiment: hardware connection
Plug the Leaf-S3 motherboard into the breadboard, and then plug the OLED display into the I2C interface. (SDA is 33, SCL is 34) After the components are connected, use a USB cable to connect the Leaf-S3 and the computer.
I2C Experiment: Code
Open the Arduino IDE. Although the code can be copied directly, we recommend that you manually enter the code yourself to familiarize yourself. code show as below:
Expand to view
#include
int UG2864Address = 0x3C;//OLED UG2864 device 7-bit address
prog_char F8X16[][16] PROGMEM =
{
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//0
0x00,0x00,0x00,0xF8,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x33,0x30,0x00,0x00,0x00,//!1
0x00,0x10,0x0C,0x06,0x10,0x0C,0x06,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//"2
0x40,0xC0,0x78,0x40,0xC0,0x78,0x40,0x00,0x04,0x3F,0x04,0x04,0x3F,0x04,0x04,0x00,//#3
0x00,0x70,0x88,0xFC,0x08,0x30,0x00,0x00,0x00,0x18,0x20,0xFF,0x21,0x1E,0x00,0x00,//$4
0xF0,0x08,0xF0,0x00,0xE0,0x18,0x00,0x00,0x00,0x21,0x1C,0x03,0x1E,0x21,0x1E,0x00,//%5
0x00,0xF0,0x08,0x88,0x70,0x00,0x00,0x00,0x1E,0x21,0x23,0x24,0x19,0x27,0x21,0x10,//&6
0x10,0x16,0x0E,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//'7
0x00,0x00,0x00,0xE0,0x18,0x04,0x02,0x00,0x00,0x00,0x00,0x07,0x18,0x20,0x40,0x00,//(8
0x00,0x02,0x04,0x18,0xE0,0x00,0x00,0x00,0x00,0x40,0x20,0x18,0x07,0x00,0x00,0x00,//)9
0x40,0x40,0x80,0xF0,0x80,0x40,0x40,0x00,0x02,0x02,0x01,0x0F,0x01,0x02,0x02,0x00,//*10
0x00,0x00,0x00,0xF0,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x1F,0x01,0x01,0x01,0x00,//+11
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0xB0,0x70,0x00,0x00,0x00,0x00,0x00,//,12
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x01,//-13
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x00,0x00,//.14
0x00,0x00,0x00,0x00,0x80,0x60,0x18,0x04,0x00,0x60,0x18,0x06,0x01,0x00,0x00,0x00,///15
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F,0x00,//016
0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//117
0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30,0x00,//218
0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E,0x00,//319
0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24,0x00,//420
0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E,0x00,//521
0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E,0x00,//622
0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00,0x00,//723
0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1C,0x00,//824
0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F,0x00,//925
0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,//:26
0x00,0x00,0x00,0x80,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x60,0x00,0x00,0x00,0x00,//;27
0x00,0x00,0x80,0x40,0x20,0x10,0x08,0x00,0x00,0x01,0x02,0x04,0x08,0x10,0x20,0x00,//<28
0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x00,0x04,0x04,0x04,0x04,0x04,0x04,0x04,0x00,//=29
0x00,0x08,0x10,0x20,0x40,0x80,0x00,0x00,0x00,0x20,0x10,0x08,0x04,0x02,0x01,0x00,/>30
0x00,0x70,0x48,0x08,0x08,0x08,0xF0,0x00,0x00,0x00,0x00,0x30,0x36,0x01,0x00,0x00,//?31
0xC0,0x30,0xC8,0x28,0xE8,0x10,0xE0,0x00,0x07,0x18,0x27,0x24,0x23,0x14,0x0B,0x00,//@32
0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x38,0x20,//A33
0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E,0x00,//B34
0xC0, 0x30, 0x08, 0x08, 0x08, 0x08, 0x38, 0x00, 0x07, 0x18, 0x20, 0x20, 0x20, 0x10, 0x08, 0x00, //C35
0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F,0x00,//D36
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18,0x00,//E37
0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00,0x00,//F38
0xC0, 0x30, 0x08, 0x08, 0x08, 0x38, 0x00, 0x00, 0x07, 0x18, 0x20, 0x20, 0x22, 0x1E, 0x02, 0x00, //G39
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x20,0x3F,0x21,0x01,0x01,0x21,0x3F,0x20,//H40
0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//I41
0x00,0x00,0x08,0x08,0xF8,0x08,0x08,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,0x00,//J42
0x08,0xF8,0x88,0xC0,0x28,0x18,0x08,0x00,0x20,0x3F,0x20,0x01,0x26,0x38,0x20,0x00,//K43
0x08,0xF8,0x08,0x00,0x00,0x00,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x20,0x30,0x00,//L44
0x08,0xF8,0xF8,0x00,0xF8,0xF8,0x08,0x00,0x20,0x3F,0x00,0x3F,0x00,0x3F,0x20,0x00,//M45
0x08,0xF8,0x30,0xC0,0x00,0x08,0xF8,0x08,0x20,0x3F,0x20,0x00,0x07,0x18,0x3F,0x00,//N46
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x10,0x20,0x20,0x20,0x10,0x0F,0x00,//O47
0x08,0xF8,0x08,0x08,0x08,0x08,0xF0,0x00,0x20,0x3F,0x21,0x01,0x01,0x01,0x00,0x00,//P48
0xE0,0x10,0x08,0x08,0x08,0x10,0xE0,0x00,0x0F,0x18,0x24,0x24,0x38,0x50,0x4F,0x00,//Q49
0x08,0xF8,0x88,0x88,0x88,0x88,0x70,0x00,0x20,0x3F,0x20,0x00,0x03,0x0C,0x30,0x20,//R50
0x00,0x70,0x88,0x08,0x08,0x08,0x38,0x00,0x00,0x38,0x20,0x21,0x21,0x22,0x1C,0x00,//S51
0x18,0x08,0x08,0xF8,0x08,0x08,0x18,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//T52
0x08,0xF8,0x08,0x00,0x00,0x08,0xF8,0x08,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//U53
0x08,0x78,0x88,0x00,0x00,0xC8,0x38,0x08,0x00,0x00,0x07,0x38,0x0E,0x01,0x00,0x00,//V54
0xF8,0x08,0x00,0xF8,0x00,0x08,0xF8,0x00,0x03,0x3C,0x07,0x00,0x07,0x3C,0x03,0x00,//W55
0x08,0x18,0x68,0x80,0x80,0x68,0x18,0x08,0x20,0x30,0x2C,0x03,0x03,0x2C,0x30,0x20,//X56
0x08,0x38,0xC8,0x00,0xC8,0x38,0x08,0x00,0x00,0x00,0x20,0x3F,0x20,0x00,0x00,0x00,//Y57
0x10,0x08,0x08,0x08,0xC8,0x38,0x08,0x00,0x20,0x38,0x26,0x21,0x20,0x20,0x18,0x00,//Z58
0x00,0x00,0x00,0xFE,0x02,0x02,0x02,0x00,0x00,0x00,0x00,0x7F,0x40,0x40,0x40,0x00,//[59
0x00,0x0C,0x30,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x06,0x38,0xC0,0x00,//\60
0x00,0x02,0x02,0x02,0xFE,0x00,0x00,0x00,0x00,0x40,0x40,0x40,0x7F,0x00,0x00,0x00,//]61
0x00,0x00,0x04,0x02,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//^62
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x80,//_63
0x00,0x02,0x02,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//`64
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x19,0x24,0x22,0x22,0x22,0x3F,0x20,//a65
0x08,0xF8,0x00,0x80,0x80,0x00,0x00,0x00,0x00,0x3F,0x11,0x20,0x20,0x11,0x0E,0x00,//b66
0x00,0x00,0x00,0x80,0x80,0x80,0x00,0x00,0x00,0x0E,0x11,0x20,0x20,0x20,0x11,0x00,//c67
0x00,0x00,0x00,0x80,0x80,0x88,0xF8,0x00,0x00,0x0E,0x11,0x20,0x20,0x10,0x3F,0x20,//d68
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x22,0x22,0x22,0x22,0x13,0x00,//e69
0x00,0x80,0x80,0xF0,0x88,0x88,0x88,0x18,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//f70
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x6B,0x94,0x94,0x94,0x93,0x60,0x00,//g71
0x08,0xF8,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//h72
0x00,0x80,0x98,0x98,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//i73
0x00,0x00,0x00,0x80,0x98,0x98,0x00,0x00,0x00,0xC0,0x80,0x80,0x80,0x7F,0x00,0x00,//j74
0x08,0xF8,0x00,0x00,0x80,0x80,0x80,0x00,0x20,0x3F,0x24,0x02,0x2D,0x30,0x20,0x00,//k75
0x00,0x08,0x08,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00,0x00,//l76
0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3F,//m77
0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x3F,0x21,0x00,0x00,0x20,0x3F,0x20,//n78
0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x00,0x1F,0x20,0x20,0x20,0x20,0x1F,0x00,//o79
0x80,0x80,0x00,0x80,0x80,0x00,0x00,0x00,0x80,0xFF,0xA1,0x20,0x20,0x11,0x0E,0x00,//p80
0x00,0x00,0x00,0x80,0x80,0x80,0x80,0x00,0x00,0x0E,0x11,0x20,0x20,0xA0,0xFF,0x80,//q81
0x80,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x20,0x20,0x3F,0x21,0x20,0x00,0x01,0x00,//r82
0x00,0x00,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x33,0x24,0x24,0x24,0x24,0x19,0x00,//s83
0x00,0x80,0x80,0xE0,0x80,0x80,0x00,0x00,0x00,0x00,0x00,0x1F,0x20,0x20,0x00,0x00,//t84
0x80,0x80,0x00,0x00,0x00,0x80,0x80,0x00,0x00,0x1F,0x20,0x20,0x20,0x10,0x3F,0x20,//u85
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x00,0x01,0x0E,0x30,0x08,0x06,0x01,0x00,//v86
0x80,0x80,0x00,0x80,0x00,0x80,0x80,0x80,0x0F,0x30,0x0C,0x03,0x0C,0x30,0x0F,0x00,//w87
0x00,0x80,0x80,0x00,0x80,0x80,0x80,0x00,0x00,0x20,0x31,0x2E,0x0E,0x31,0x20,0x00,//x88
0x80,0x80,0x80,0x00,0x00,0x80,0x80,0x80,0x80,0x81,0x8E,0x70,0x18,0x06,0x01,0x00,//y89
0x00,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x00,0x21,0x30,0x2C,0x22,0x21,0x30,0x00,//z90
0x00,0x00,0x00,0x00,0x80,0x7C,0x02,0x02,0x00,0x00,0x00,0x00,0x00,0x3F,0x40,0x40,//{91
0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0xFF,0x00,0x00,0x00,//|92
0x00,0x02,0x02,0x7C,0x80,0x00,0x00,0x00,0x00,0x40,0x40,0x3F,0x00,0x00,0x00,0x00,//}93
0x00,0x06,0x01,0x01,0x02,0x02,0x04,0x04,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,//~94
};
char ch_buf[17]={0};
int RES = 6;//Gadgeteer PIN6
int DC = 7;//Gadgeteer PIN3
void Writec(unsigned char COM)
{
Wire.beginTransmission(UG2864Address);
Wire.write(0x00);
Wire.write(COM);
Wire.endTransmission();
}
void Writed(unsigned char DATA)
{
Wire.beginTransmission(UG2864Address);
Wire.write(0x40);
Wire.write(DATA);
Wire.endTransmission();
}
void SSD1306()
{
Writec(0XAE);//display off
Writec(0X00);//set lower column address
Writec(0X10);//set higher column address
Writec(0X40);//set display start line
Writec(0XB0);//set page address
Writec(0X81);//set contract control
Writec(0XCF);// VCC Generated by Internal DC/DC Circuit
Writec(0XA0);//set segment remap column address 127 is mapped to SEG0
Writec(0XA6);//normal / reverse normal display
Writec(0XA8);//multiplex ratio
Writec(0X3F);//1/64
Writec(0XC0);//Com scan direction remapped mode. Scan from COM[N-1] to COM0
Writec(0XD3);//set display offset
Writec(0X00);
Writec(0XD5);//set osc division
Writec(0X80);
Writec(0XD9);//set pre-charge period
Writec(0X11);
Writec(0XDa);//setCOM pins
Writec(0X12);
Writec(0X8d);/*set charge pump enable*/
Writec(0X14);
Writec(0Xdb);//Set VcomH
Writec(0X20);
Writec(0XAF);//display ON
}
void fill(unsigned char dat)
{
unsigned char i,j;
Writec(0x00);//set lower column address
Writec(0x10);//set higher column address
Writec(0xB0);//set page address
for(j=0;j<8;j++)
{
Writec(0xB0+j);//set page address
Writec(0x00);//set lower column address
Writec(0x10);//set higher column address
for(i=0;i<128;i++)
{
Writed(dat);
}
}
}
void show_string(unsigned char x,unsigned char y,char *s)
{
unsigned char i,j,lower,higher;
char *t;
t=s;
lower=y%16;
higher=y/16;
if((x>3) || (y>120))
return;
Writec(0xB0+x*2);//set page address
Writec(lower);//set lower column address
Writec(0x10+higher);//set higher column address
for(j=0;*s!='\0';j++)
{
for(i=0;i<8;i++){
ch_buf[i] = pgm_read_word(&F8X16[*s-32][i]);
}
for(i=0;i<8;i++)
Writed(ch_buf[i]);
s++;
}
Writec(0xB0+x*2+1);//set page address
Writec(lower);//set lower column address
Writec(0x10+higher);//set higher column address
s=t;
for(j=0;*s!='\0';j++)
{
for(i=0;i<8;i++){
ch_buf[i] = pgm_read_word(&F8X16[*s-32][i+8]);
}
for(i=0;i<8;i++)
Writed(ch_buf[i]);
s++;
}
}
void oled_init(void)
{
pinMode(RES,OUTPUT);//RES
pinMode(DC,OUTPUT);//D/C#
digitalWrite(DC,LOW);
Wire.begin();
digitalWrite(RES,HIGH); delay(100);
digitalWrite(RES,LOW); delay(100);
digitalWrite(RES,HIGH); delay(100);
SSD1306();
fill(0x00);
}
void setup() {
oled_init();
}
void loop()
{
fill(0x00);
show_string(0,12,"BananaPi");
show_string(2,12,"banana-pi.org");
while(1);
}
After the input is complete, click "Compile" to check the code for errors. After making sure there are no errors, you can start uploading. After clicking "Upload", the IDE will send the code to the Leaf-S3 motherboard. When the upload is complete, the OLED display will show "BananaPi banana-pi.org".
I2C Experiment: Code Analysis
Compared with the previous projects, the code of this project is more, mainly based on the direct drive of the underlying registers of the OLED display based on I2C communication.
void Writec(unsigned char COM)
Set the register function, set the OLED display through I2C, and the method of using I2C is fully compatible with Arduino.
void Writed(unsigned char DATA)
Write data function, I2C usage is fully compatible with Arduino.
Note: The I2C of Leaf-S3 is fully compatible with Arduino, mainly for calling the Wire library file.
Item Five SPI
In many sensors, SPI communication is used, because the SPI communication rate is faster than I2C, and there is no disadvantage of address conflict. SPI is a high-speed, full-duplex, synchronous communication bus, and the SPI of Leaf-S3 can be configured to all I/Os, and you can read the underlying code for use (it is not recommended for beginners). For a better user experience, Leaf-S3 is configured with IO35, IO36, and IO37 as SPI ports by default, and is fully compatible with Arduino in use. This project uses Leaf-S3 to read the data of BME280 temperature and humidity sensor through SPI. The BME280 library file is used in the example. You can read the BEM280 library file about the SPI driver. [Click the link](https://github.com/ DFRobot/DFRobot_BME280) to download the BME280 library file.
SPI Experiment: Required Components
BME280 temperature and humidity sensor X 1
Note: The BME280 sensor itself supports I2C and SPI communication, here we use SPI communication.
Breadboard X 1
Leaf-S3 Motherboard X 1
SPI experiment: code
Open the Arduino IDE. Although the code can be copied directly, we recommend that you manually enter the code yourself to familiarize yourself. (This program requires the DFRobot_BME280 library, which needs to be downloaded from GitHub and uncompressed to the Arduino\ Library folder.) The code is as follows:
Expand to view
/*!
* read_data_spi.ino
*
* Download this demo to test read data from bme280, connect sensor through spi interface
* Connect cs pin to io 2
* Data will print on your serial monitor
*
* Copyright [DFRobot](http://www.dfrobot.com), 2016
* Copyright GNU Lesser General Public License
*
* version V1.0
* date 12/03/2019
*/
#include "DFRobot_BME280.h"
#include "Wire.h"
typedef DFRobot_BME280_SPI BME; // ******** use abbreviations instead of full names ********
# define PIN_CS 2
BME bme(&SPI, PIN_CS); // select TwoWire peripheral and set cs pin id
#define SEA_LEVEL_PRESSURE 1015.0f
// show last sensor operate status
void printLastOperateStatus(BME::eStatus_t eStatus)
{
switch(eStatus) {
case BME::eStatusOK: Serial.println("everything ok"); break;
case BME::eStatusErr: Serial.println("unknow error"); break;
case BME::eStatusErrDeviceNotDetected: Serial.println("device not detected"); break;
case BME::eStatusErrParameter: Serial.println("parameter error"); break;
default: Serial.println("unknow status"); break;
}
}
void setup()
{
Serial.begin(115200);
bme.reset();
Serial.println("bme read data test");
while(bme.begin() != BME::eStatusOK) {
Serial.println("bme begin faild");
printLastOperateStatus(bme.lastOperateStatus);
delay(2000);
}
Serial.println("bme begin success");
delay(100);
}
void loop()
{
float temp = bme.getTemperature();
uint32_t press = bme.getPressure();
float alti = bme.calAltitude(SEA_LEVEL_PRESSURE, press);
float humi = bme.getHumidity();
Serial.println();
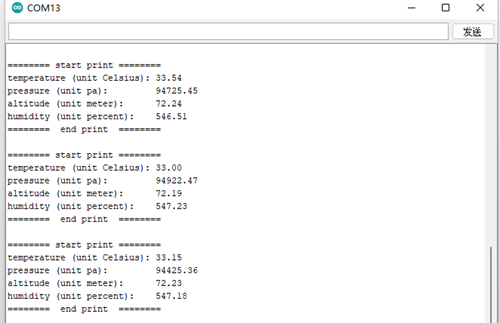
Serial.println("======== start print ========");
Serial.print("temperature (unit Celsius): "); Serial.println(temp);
Serial.print("pressure (unit pa): "); Serial.println(press);
Serial.print("altitude (unit meter): "); Serial.println(alti);
Serial.print("humidity (unit percent): "); Serial.println(humi);
Serial.println("======== end print ========");
delay(1000);
}
After the input is complete, click "Compile" to check the code for errors. After making sure there are no errors, you can start uploading. After clicking "Upload", the IDE will send the code to the Leaf-S3 motherboard. Open the Arduino serial monitor, you can see the printed information as follows:
SPI Experiment: Code Analysis
This project uses the BME280 library file, and the SPI bottom layer is not operated in the Item-5.ino file. However, the SPI of Leaf ESP32-S3 is fully compatible with Arduino.
Item Six WS2812
Leaf-S3 integrates a WS2812 RGB color light. This project is an experiment to light up the RGB lights of Leaf-S3.
WS2812 Experiment: Required Components
Leaf-S3 Motherboard X 1
Note: This project does not require other sensors to be connected.
WS2812 Experiments: Code
Open the Arduino IDE. Although the code can be copied directly, we recommend that you manually enter the code yourself to familiarize yourself. (This program needs the Adafruit_NeoPixel library, which needs to be downloaded from GitHub and unzip to the Arduino\ Library folder.) The code is as follows:
Expand to view
// NeoPixel Ring simple sketch (c) 2013 Shae Erisson
// Released under the GPLv3 license to match the rest of the
// Adafruit NeoPixel library
#include
#ifdef __AVR__
#include // Required for 16 MHz Adafruit Trinket
#endif
// Which pin on the Arduino is connected to the NeoPixels?
#define PIN 48 // On Trinket or Gemma, suggest changing this to 1
// How many NeoPixels are attached to the Arduino?
#define NUMPIXELS 1 // Popular NeoPixel ring size
// When setting up the NeoPixel library, we tell it how many pixels,
// and which pin to use to send signals. Note that for older NeoPixel
// strips you might need to change the third parameter -- see the
// strandtest example for more information on possible values.
Adafruit_NeoPixel pixels(NUMPIXELS, PIN, NEO_GRB + NEO_KHZ800);
#define DELAYVAL 500 // Time (in milliseconds) to pause between pixels
void setup() {
// These lines are specifically to support the Adafruit Trinket 5V 16 MHz.
// Any other board, you can remove this part (but no harm leaving it):
#if defined(__AVR_ATtiny85__) && (F_CPU == 16000000)
clock_prescale_set(clock_div_1);
#endif
// END of Trinket-specific code.
pixels.begin(); // INITIALIZE NeoPixel strip object (REQUIRED)
}
void loop() {
pixels.clear(); // Set all pixel colors to 'off'
// The first NeoPixel in a strand is #0, second is 1, all the way up
// to the count of pixels minus one.
for(int i=0; i < NUMPIXELS; i++) { // For each pixel...
// pixels.Color() takes RGB values, from 0,0,0 up to 255,255,255
// Here we're using a moderately bright green color:
pixels.setPixelColor(i, pixels.Color(0, 150, 0));
pixels.show(); // Send the updated pixel colors to the hardware.
delay(DELAYVAL); // Pause before next pass through loop
}
}
After the input is complete, click "Compile" to check the code for errors. After making sure there are no errors, you can start uploading. After clicking "Upload", the IDE will send the code to the Leaf-S3 motherboard. After reset, the WS2812 light will start to light up green.
Note: You can modify the RGB values in the code if you need other colors.
WS2812 Experiment: Code Analysis
This project uses the WS2812 light integrated in Leaf-S3, and the default GPIO is 48.
#define PIN 48
Set GPIO pin number
#define NUMPIXELS 1
Set the number of lights. If you want to connect more WS2812, you can change an IO and modify the number of lights.
Item Seven Touch Sensor
The Leaf-S3 provides up to 10 capacitive sensor GPIOs capable of detecting differences in capacitance caused by direct contact or proximity of fingers or other objects. This low-noise characteristic and high-sensitivity design of the circuit are suitable for smaller touch panels and can be directly used for touch switches. This project explains how to get the status of the touch sensor of Leaf-S3 through Arduino code, and print the status.
Touch Experiment: Required Components
Leaf-S3 Motherboard X 1
Note: This project does not require other sensors to be connected.
Touch experiment: code
Open the Arduino IDE. Although the code can be copied directly, we recommend that you manually enter the code yourself to familiarize yourself.
code show as below:
Expand to view
void setup()
{
Serial.begin(115200);
delay(1000); // give me time to bring up serial monitor
Serial.println("Leaf-S3 Touch Test");
}
void loop(){
Serial.println(touchRead(T2)); // get value using T0->D9
delay(100);
}
After the input is complete, click "Compile" to check the code for errors. After making sure there are no errors, you can start uploading. After clicking "Upload", the IDE will send the code to the Leaf-S3 motherboard. Open the Arduino IDE serial monitor, and touch GPIO2 (T2 corresponds to GPIO2), you can see that the printed data suddenly becomes smaller, as shown in the figure below:
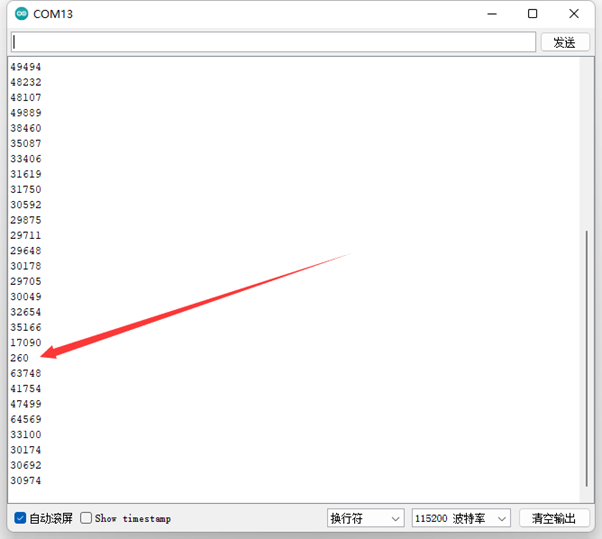
Touch Experiment: Code Analysis
To get the GPIO status of the touch sensor, you only need to call the touchRead function. The function prototype is as follows:
uint16_t touchRead(uint8_t pin)
Returns "0" for no touch and "1" for touch. The pins are T0~T9, and the pins corresponding to the Leaf are shown in the following table:
| Touch sensor serial number | Corresponding ESP32 hardware | Leaf-S3 | |
| T1 | GPIO1 | IO1 | |
| T2 | GPIO2 | IO2 | |
| T3 | GPIO3 | IO3 | |
| T4 | GPIO4 | IO4 | |
| T5 | GPIO5 | IO5 | |
| T6 | GPIO6 | IO6 | |
| T7 | GPIO7 | IO7 | |
| T8 | GPIO8 | IO8 | |
| T9 | GPIO9 | IO9 | |
| T10 | GPIO10 | IO10 | |
| T11 | GPIO11 | IO11 | |
| T12 | GPIO12 | IO12 | |
| T13 | GPIO13 | IO13 | |
| T14 | GPIO14 | IO14 | |