2023-11-01
使用旋转编码器与菜单栏交互,做一个电子相册
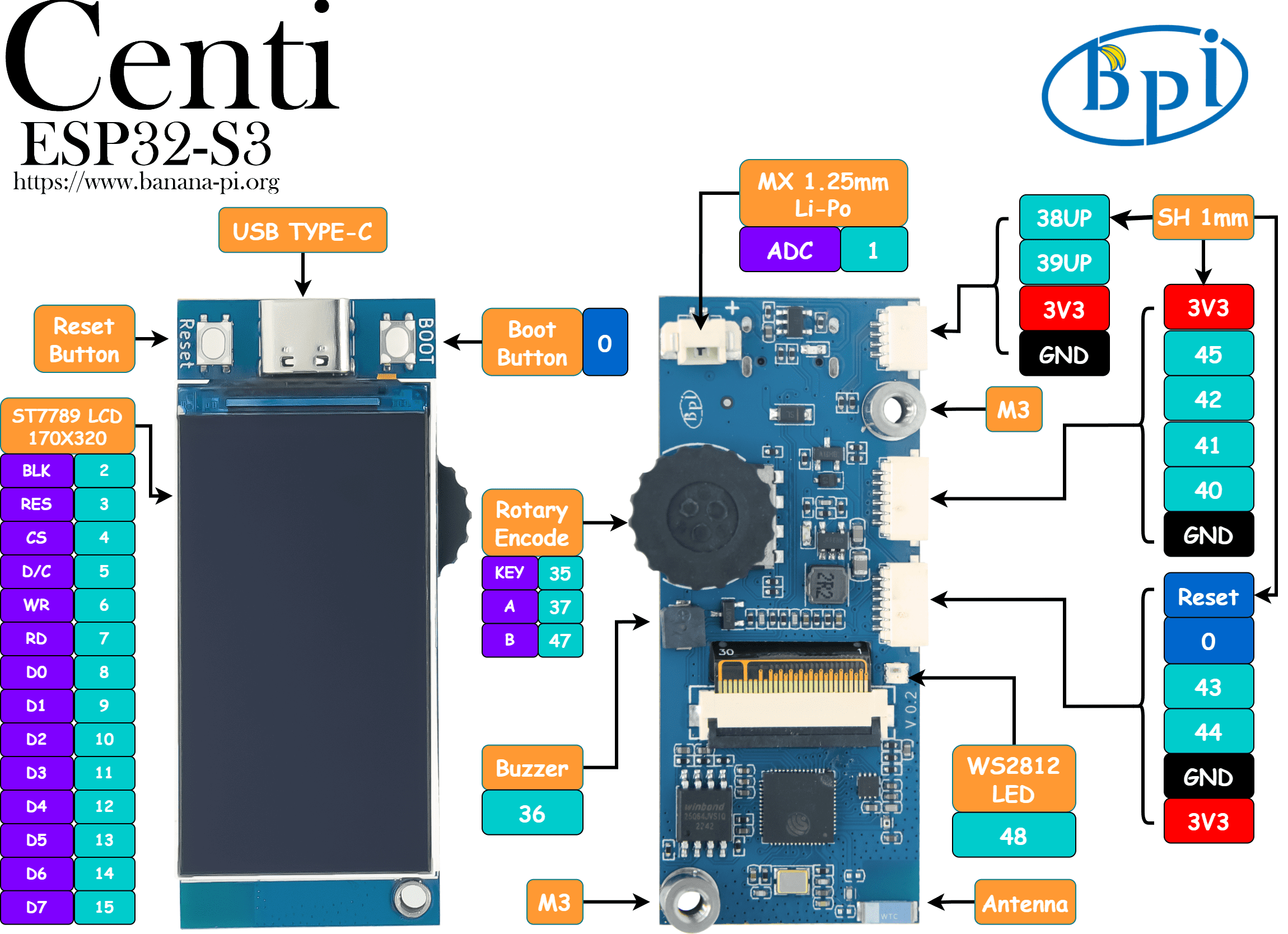
BPI-Centi-S3上自带一个增量型旋转编码器,利用它可以很方便的与屏幕上显示的内容进行交互控制。
增量型旋转编码器
增量型旋转编码器外观粗看与一些常见的旋转电位器相似,其关键的不同之处大致分为三点。
1.1 微控制器使用ADC外设来读取旋转电位器输出的模拟信号(电压值),确定转轴当前角位;微控制器通过GPIO接收增量型旋转编码器输出的数字信号,可通过软件程序判断信号所对应的转轴动作。
1.2 微控制器可在一定精度下,确定旋转电位器转轴当前角位,但因为模拟信号的持续性与抗干扰能力差的原因,无法准确判断它是否有动作;增量型旋转编码器仅在转轴运动到一个触点时,向微控制器发出一段动作数字信号,如果一个增量型旋转编码器一周有20个触点,它旋转一周就触发20次动作信号,微控制器可以精确的判断它是否动作,向哪个方向转动,信号触发了多少次。
1.3 旋转电位器通常不可向任意转向进行无限旋转,会停止在最大或最小限位点;增量型旋转编码器可向任意转向进行无限旋转。
增量型旋转编码器采用正交编码器生成其A和B的输出信号。从A和B输出发射的脉冲是正交编码的,这意味着当增量编码器以恒定速度运动时,A和B波形是方波,A和B之间存在90度的相位差。最终A和B信号将从两个管脚传输给微控制器。
理论上,在任何特定时间,对于旋转编码器,A和B信号之间,顺时针旋转的相位差为+90°,逆时针旋转的相位差为−90°,具体则取决于设备内部的正交编码器设计。
A或B输出上的脉冲频率与转轴的速度(位置变化率)成正比。较高的频率表示较快的速度,而较低的频率表示较慢的速度。当转轴静止时,静态、不变的信号输出在A和B上,所以有很多测速方案使用增量型旋转编码器。
参考 维基百科: 增量编码器 。